Models in DexSuite
DexSuite offers a set of high-quality models of dexterous robotic hands and objects, ideal for hand manipulation, formatted in URDF. These models have been tested in several physical simulators. You can also obtain the models from our Github Repository.
Robot URDF Models
| Allegro Hand | Shadow Hand | SCHUNK SVH Hand |
|---|---|---|
 |  | 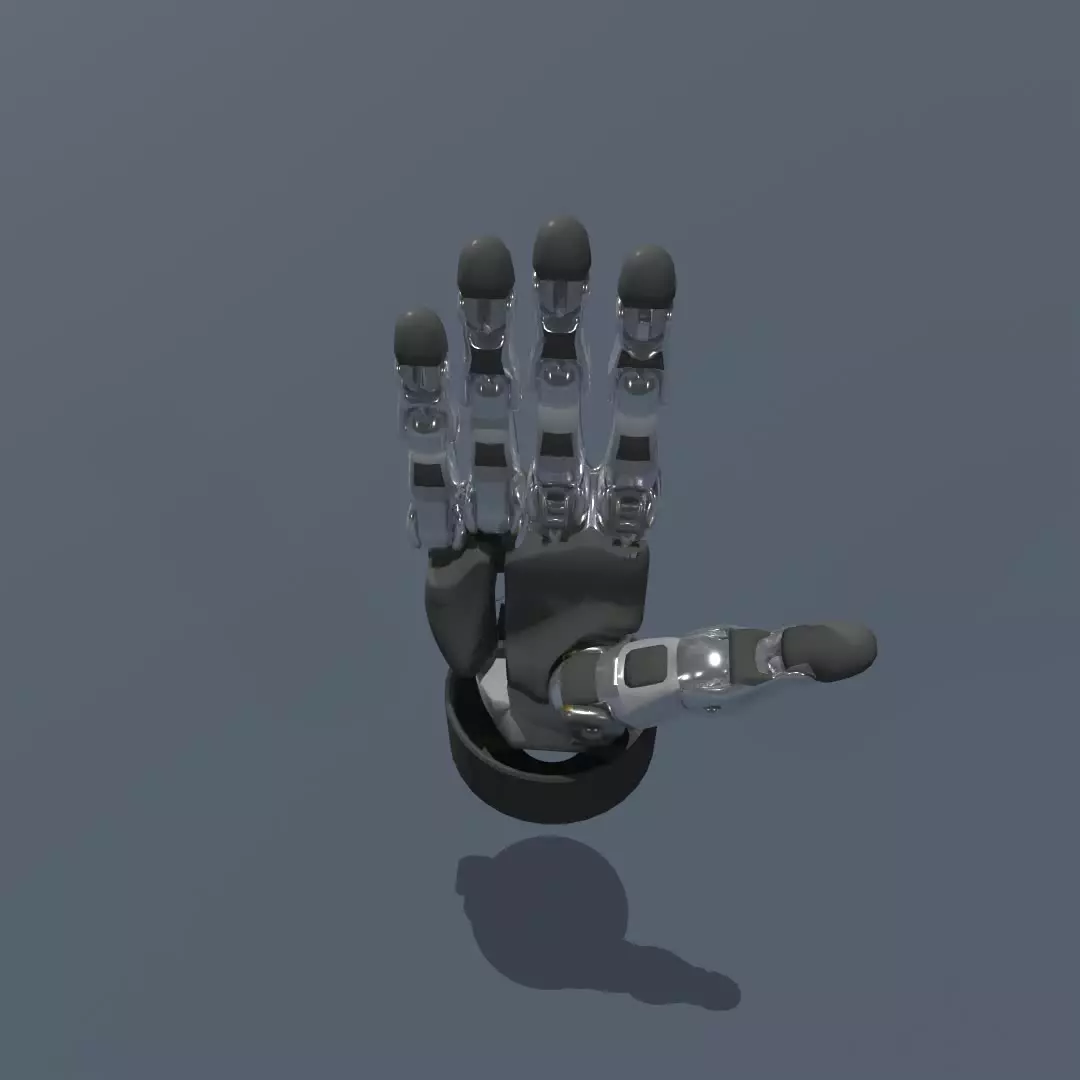 |
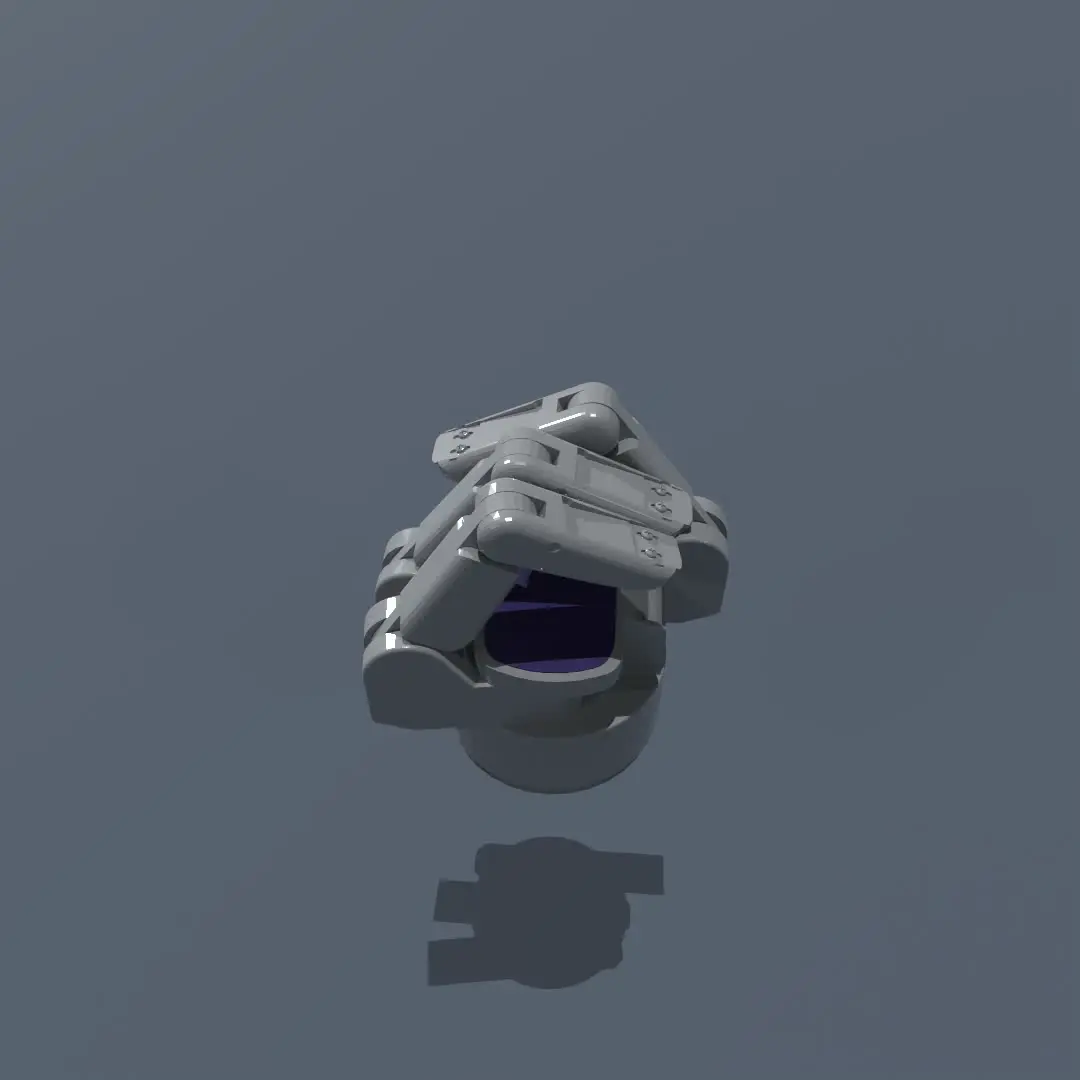
| Ability Hand | Leap Hand | DClaw Gripper |
 |  |  |
| Barrett Hand | ||
 |
Why we need these robot models?
Several of the robot models, based on the URDF, have been adapted from the original URDF supplied by the manufacturer. You might question the need to use these models over the original URDF. The reason is that while the URDF format was initially designed to represent robot models, it wasn't specifically tailored for simulation. The primary use of URDF was intended for ROS, for instance, visualization in rviz or kinematics computation with MoveIt. Currently, many physical simulators also employ URDF to load robot models, and simulation demands a higher standard of model quality compared to kinematics computation.
We've made several improvement to the original models provided by the manufacturers:
- Better collision mesh
- Better visual mesh
- Better inertia and joint parameters
- Uniform URDF parsing across diverse parsers
- Standardized frame convention
- Added auxiliary links
- Variation model, e.g. with contact sensor
Source and license
| Robot Model | Official Website | URDF Source | CAD Model Source | License |
|---|---|---|---|---|
| Allegro Hand | Wonik Robotics | allegro_hand_ros | N/A | BSD |
| SCHUNK SVH Hand | SCHUNK | schunk_svh_ros_driver | N/A | Apache-2.0 |
| Shadow Hand | Shadow Robot Company | schunk_svh_ros_driver | N/A | GPL-3.0 |
| Robel DClaw | Robel Benchmark | N/A | D'Claw CAD | Apache-2.0 |
| Barrett Hand | Barrett Technology | bhand_model | BarrettHand CAD | BSD |
| Ability Hand | PSYONIC | ability-hand-api | N/A | N/A |